

I am currently a postdoctoral fellow in the Learning Algorithms and Systems Laboratory (LASA) at the Swiss Federal Institute of Technology Lausanne (EPFL).
My research interests cover a large spectrum of topics targeted at bringing robots closer to humans in their everyday life. By means of machine learning and human-robot interaction techniques, my work aims at providing robots with abilities a) to learn from humans using strategies similar to those used by humans themselves, and b) to further refine their skills through self-exploration and reasoning.
In addition to endowing robots with constantly increasing skills, I also strongly believe that, in the future, humans will also learn and gain important personal experience while interacting with robots.
Machine learning for robotics
|
Entertainment robotics
|
RobotToolKit, a robot simulator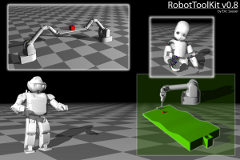
|